|
|
|
By 1954, Gyrodyne's Model 2C
had been instrumented for its' Flight Test Program. The The Model 2C used Movable vertical surfaces (rudders) and differential collective in the rotors for yaw control. The results of the instrumented flight test indicated that the coaxial rotor configuration possessed excellent flying qualities in all regimes of flight except for the low speed autorotation where the yaw control means proved inadequate. In order to overcome this difficulty, Gyrodyne continued its research work toward improving the directional control characteristics. In March of 1953, the idea of using tip brakes (seen below) on the tips of the rotor blades was conceived. Flight tests of this concept proved that the problem of effective yaw control in autorotation for a coaxial helicopter had been solved. This was a major breakthrough for the coaxial configuration. The Company applied for and was granted Patent No. 2,835,331 on October 24, 1954.
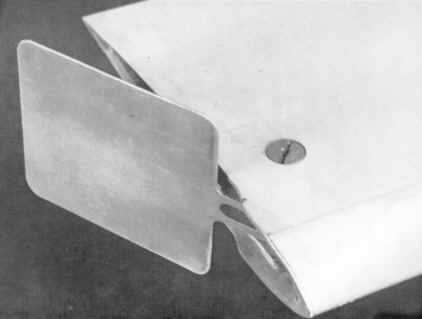
Two type of tip brakes had actually been developed, one
designated as the "flag type" (as seen below)
and the other as the "probe type" (as seen
below the flag type). The "flag type" had been selected for
designs involving blades for small size helicopters where the physical
dimensions essentially prohibited the installation of the "probe
type." The "probe type" was therefore reserved for larger sized
helicopters and would later be incorporated in the company's
Heavy-Lift-Helicopter proposal.
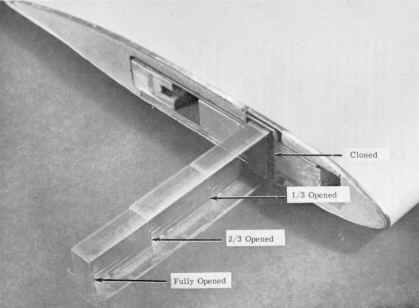
The manner in which the Tip Brakes worked was relatively simple. When a coaxial helicopter is hovering, its' upper rotor set is rotating counter-clockwise and the lower rotor set is rotating in the clockwise direction. If the rotor sets are balanced, the rotor system is said to be "torque neutralized". However, by depressing on the left pilot's rudder pedal, connected to the tip brake shaft via a series of bell cranks, the lower rotor sets' tip brakes open, causing drag and a unequal torque distribution in the rotor system which turns the helicopter opposite the rotation of the rotor set without the tip brakes extended. A right turning moment results from upper rotor tip brake deflection. In the neutral condition, both sets of tip brakes are undeflected. The Tip Brake innovation Creates a New Helicopter Less than one year from the date of "authorization to proceed", the first flight of the XRON-1 (seen above) occurred on November 23, 1955. With a gross weight of 500 lb. and a 15-ft. rotor diameter, the two-cycle 40 horse powered XRON-1 was 11 times SMALLER than the 5400 lb model 2B! Flight testing by the Marine Corps team soon began and the high cylinder temperatures being generated by the Nelson indicated that engine life would be too short to be successful. A different engine was needed. Mr. Papadakos is seen right with two Navy officers during the initial testing period.
In mid 1956, Gyrodyne requested the Naval Bureau of Aeronautics (BuAer) to consider changing the XRON-1 engine to that of a modified Porsche automobile engine. Gyrodyne received approval in late 1956 and by early 1957 the XRON-1 was flying again. While this was occurring, BuAer was also proceeding on its own with the development of a small turbine powered engine suitable for the XRON. By mid 1957, Mr. Papadakos now had three engines powering his company's XRON helicopter:
With all three versions having been tested
by late 1957, the most
With a payload weight approaching what the
Navy wanted in their Drone Anti-Submarine Despite
the eventual award for the procurement of nine of the DSN-1 droned XRONs,
Gyrodyne continued to demonstrate its' XRON to the public to stimulate the
manned application of its coaxial helicopter. In 1961, those efforts were
rewarded when the 72-HP Porsche powered XRON won the Grand Prize for the most
maneuverable helicopter at the International Paris Air Show at Le Bourget,
France. After that 1964 flying season, however, all XRON Rotorcycle work ended as the QH-50C drone was in full production and Gyrodyne's resources were being used to the limit in order to rush as many drones to the fleet as possible; DASH was now a top priority with the Department of Defense due to Russian submarine capabilities and the then current political tensions. XRON flights were kept to a minimum during the 60's and kept to Gyrodyne's Long Island Facility where they were used commonly for chase-aircraft during QH-50 flight operations. When QH-50 manufacturing and flight operations ended in 1970-72, the remaining Rotorcycles were placed in storage. In 1999, Gyrodyne Company of America formally divested itself of all helicopter assets and sold the residual to a private firm. Although it is unfortunate that the "cheaper to build" anti-torque tail rotor configuration has taken over the rotorcraft industry in the United States, the "No Tail rotor to fail" XRON maintained a perfect flying record of no crashes and no fatalities. Today's only coaxial manufacturer is the Russian firm, KAMOV.
|
|
The name "Gyrodyne" in its stylized
form above, is the Trademark of and owned by the Gyrodyne Helicopter Historical
Foundation; unauthorized use is PROHIBITED by Federal Law. All Photographs, technical specifications, and
content are herein copyrighted and owned exclusively by Gyrodyne Helicopter
Historical Foundation, unless otherwise stated. All Rights Reserved
©2013. |
 instrumentation package had included
an oscillograph and a photographic panel. The Flight Test Program had been completed and
the final report submitted by December 1952. Although, it had been the first
documented flight test of the flying qualities of a coaxial rotor helicopter in the United States,
the report raised concerns.
instrumentation package had included
an oscillograph and a photographic panel. The Flight Test Program had been completed and
the final report submitted by December 1952. Although, it had been the first
documented flight test of the flying qualities of a coaxial rotor helicopter in the United States,
the report raised concerns. 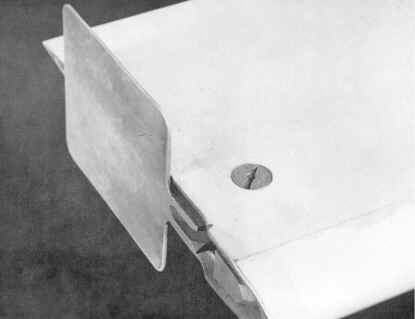
 By 1955, Gyrodyne was looking for a
helicopter contract to demonstrate their new innovative yaw control for their
coaxial rotor system. That contract came in the form of U.S. Navy contract NOas
55-388-c. In this contract, the U.S. Marine corps was looking for a small sized
helicopter that could be dropped to a stranded pilot behind enemy lines, in
which the pilot could quickly "snap together" the helicopter and fly
out of harms way. This contract had been issued shortly after the end of the
Korean War where many a fighter pilot had become captured due to a lack of
extraction capability.
By 1955, Gyrodyne was looking for a
helicopter contract to demonstrate their new innovative yaw control for their
coaxial rotor system. That contract came in the form of U.S. Navy contract NOas
55-388-c. In this contract, the U.S. Marine corps was looking for a small sized
helicopter that could be dropped to a stranded pilot behind enemy lines, in
which the pilot could quickly "snap together" the helicopter and fly
out of harms way. This contract had been issued shortly after the end of the
Korean War where many a fighter pilot had become captured due to a lack of
extraction capability. 



 satisfactory
results emerged from the Porsche combination. BuAer then authorized Gyrodyne to
enter into negotiations with the Porsche Company of Germany to develop a
suitable engine strictly for the Rotorcycle application.
satisfactory
results emerged from the Porsche combination. BuAer then authorized Gyrodyne to
enter into negotiations with the Porsche Company of Germany to develop a
suitable engine strictly for the Rotorcycle application. 


 Helicopter (DASH) concept vehicle, the Navy approached Gyrodyne regarding the
replacement of the pilot for radio controlled equipment. The Navy wanted the 72
HP Porsche XRON, but it was not ready for first flight, when the Navy awarded
Gyrodyne an authorization to proceed and investigate the modifications necessary
to drone the XRON. Award date was December 31, 1958 under contract NOas
59-0219-c. The XRON with the 72 HP Porsche first flew in mid 1959. Within 1 year
and 8 months from contract award date, the droned XRON first flew at NATC,
Patuxent River, Maryland on August 12, 1960. This
was the first remote controlled helicopter flight in the world.
Helicopter (DASH) concept vehicle, the Navy approached Gyrodyne regarding the
replacement of the pilot for radio controlled equipment. The Navy wanted the 72
HP Porsche XRON, but it was not ready for first flight, when the Navy awarded
Gyrodyne an authorization to proceed and investigate the modifications necessary
to drone the XRON. Award date was December 31, 1958 under contract NOas
59-0219-c. The XRON with the 72 HP Porsche first flew in mid 1959. Within 1 year
and 8 months from contract award date, the droned XRON first flew at NATC,
Patuxent River, Maryland on August 12, 1960. This
was the first remote controlled helicopter flight in the world.